|
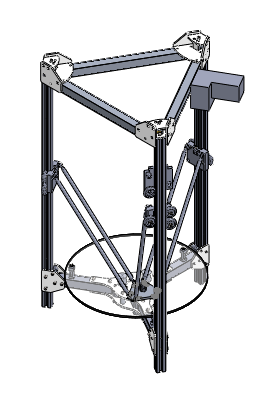
Working with a friend, I designed a delta style 3D printer (CAD design shown to the right) inspired from the printer shown above. The system used a cable drive on three pillars made out of 80/20 extrusion to make a three axis platform. Mounting for an extruder was located on this platform to turn the robot into a 3D printer. I designed most of the mechanical system, including the carriages for the linear motion system, the structure of printer and the filament roll. I also solved the forward kinematics of the system in MatLab and generated drawings for parts to be made. Unfortunately we were unable to build the system due to lack of time.
|
|