|
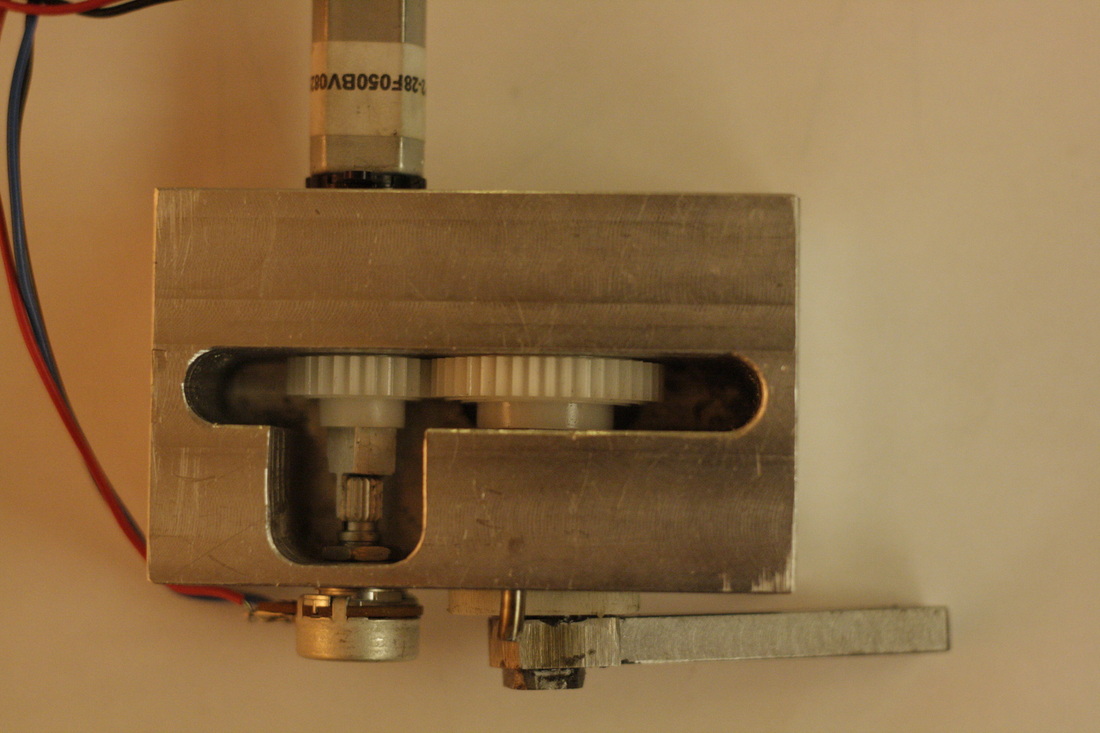
In this project, I worked with a team of two other students to create a custom servomotor from a motor and a potentiometer that would respond to a position command from a computer interface. I designed and fabricated the mechanical system, which consists of a custom made gearbox that links the motor, the potentiometer and a pendulum to simulate a load. The housing is milled from a block of 6061 aluminum, and delrin bushings were pressed in to support custom made shafts for the bearings and load.
|
|