|
The Robot-X challenge is a Darpa sponsored challenge in which teams build autonomous boats and complete navigation and artificial intelligence challenges.
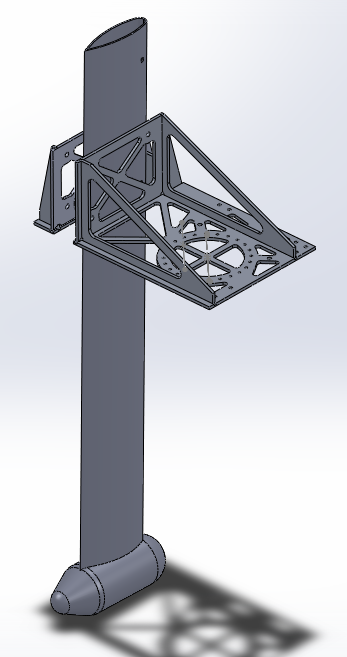
I worked on the mechanical part of the team to design sonar pods that could mount acoustic sensors one meter below the water and withstand sudden impact if the boat ran aground or attempted to turn too forcefully. The mounts are built from 1/4" welded aluminum. They mount the sonar pods on the side of the pontoons on both sides of the front of the boat. This allows the pods to be significantly removed from the noise generated by the motor pods in the rear. Lightening patters were determined from FEA simulations so that the parts could be as light as possible, while still being able to support 300lb+ loads. I also designed the 3d printed pod that mounted the sonar assembly below the water. This assembly had to withstand impact if the boat ran aground, so the sonar sensors were covered with overmolded urethane rubber. While the competition has not yet taken place we have high hopes for the success of our boat. |
|
